汽车模型仿真十大排名(1000TOPS)
周彦武
安霸成立于2004年,核心团队均来自硅谷,创始人王奉民。安霸依靠GoPro运动相机一炮而红,并借助群光电子打入GoPro供应链,是GoPro独家芯片供应商。运动相机市场饱和后,安霸转入行车记录仪业务,后自2018年开始进军汽车ADAS前装市场,安霸2021年收入大约3亿美元,其中约15%来自汽车前装领域。目前已进入丰田高端雷克萨斯供应链,新兴造车企业Rivian也是安霸客户,此外还有现代汽车与安波福合资的Motional,与Uber合作打造无人车的英国新兴造车势力ARRIVAL。安霸自2022年开始进军L4级自动驾驶域控制器,首发芯片CV3。

图片来源:互联网
国内客户主要有吉利、长安、长城、上汽、宇通、比亚迪,合作项目主要是行车记录仪或DMS。
图片来源:互联网
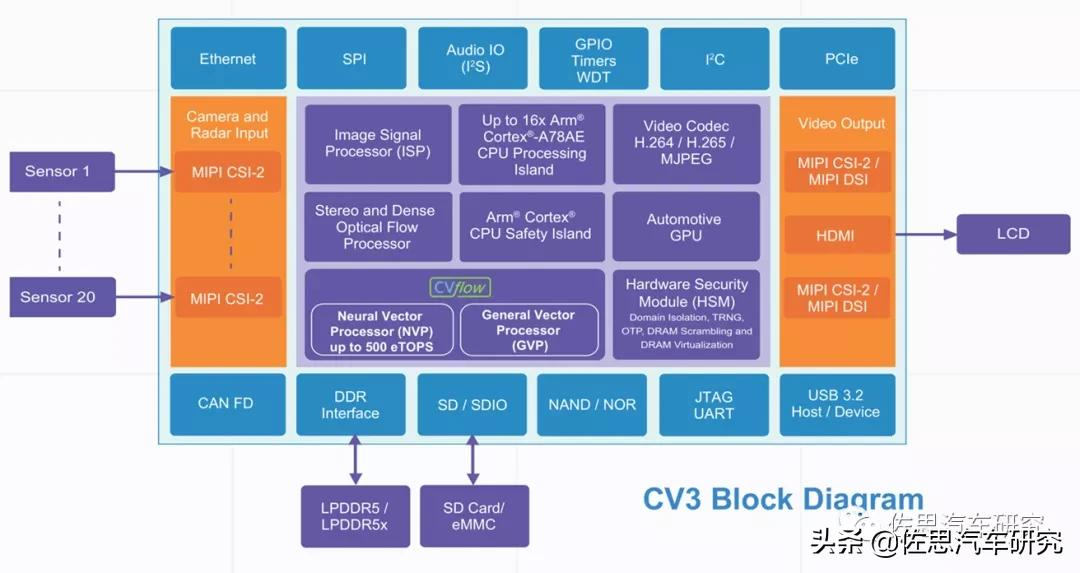
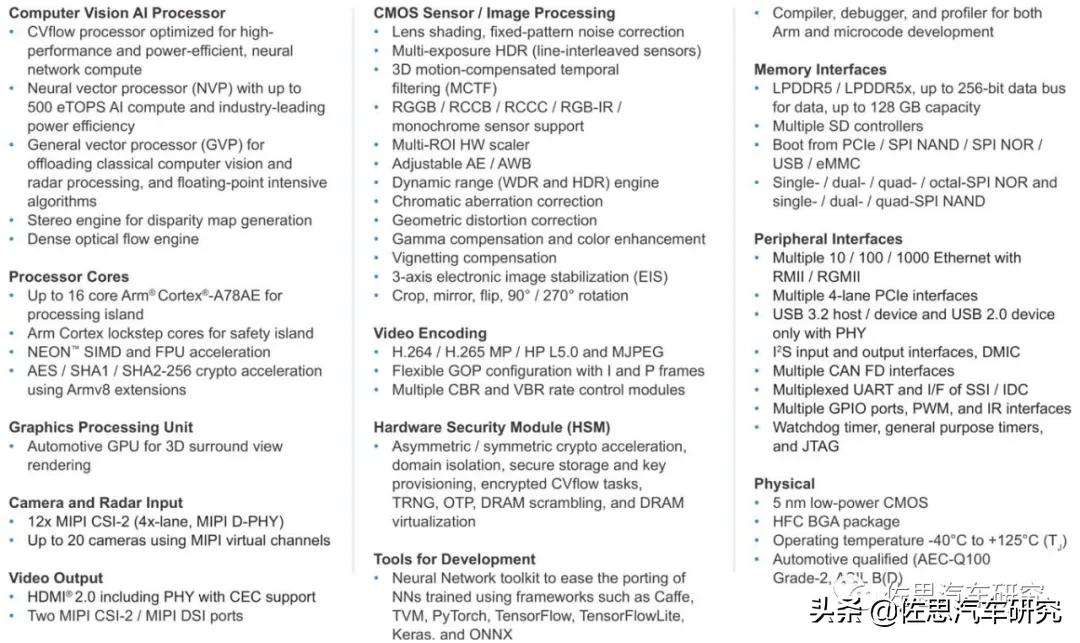
安霸在2021年下半年推出CV3,采用16核ARM Cortex-A78AE设计,同样的内核也可以在英伟达的Orin里发现,不过Orin是12核。AI算力方面,INT8位精度达500TOPS,如果INT4位精度,可达1000TOPS。
图片来源:互联网
安霸CV3简介,采用三星5纳米工艺制造,比英伟达Orin的7纳米要高。运行温度范围最高上限达125℃,比Orin高20度。功能安全达到B级,加上MCU安全岛为D级。安霸晶圆代工合作伙伴一直都是三星,产能比较宽松,价格也最低。
图片来源:互联网
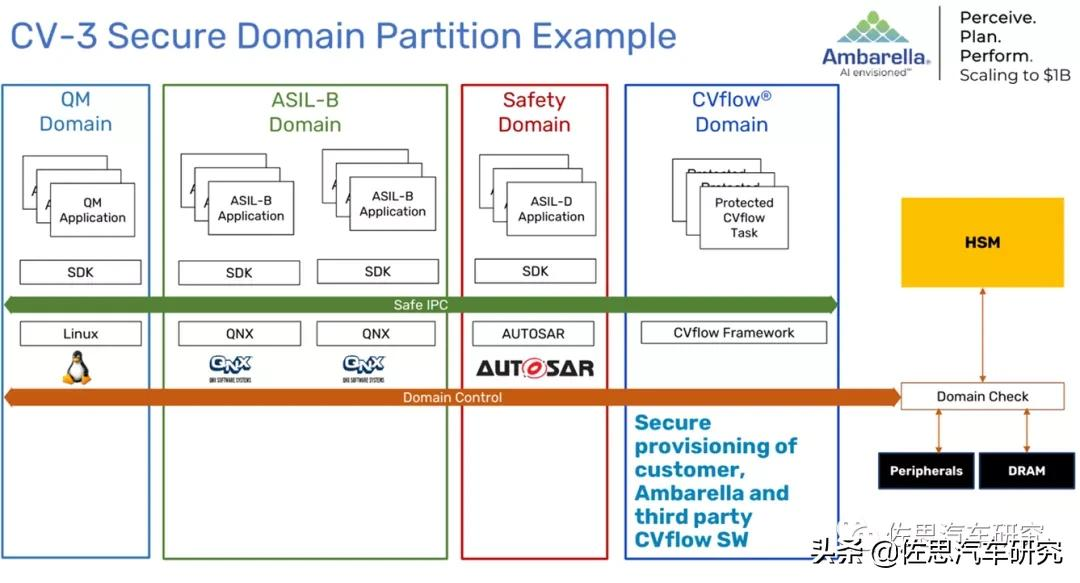
ASIL-B级主要就是决策部分,其底层采用QNX操作系统。安全域采用ARM的安全岛即Cortex R-52。域控制器层面采用硬件安全模块(HSM),这是安霸的特色之一。
HSM对于完全的安全车载通信 (SecureOnboard Communication, SecOC) 是必不可少的。HSM有助于确保所收到的所有数据的真实性,并防止攻击者通过绕过与安全性相关的ECU接口,获得对中央处理器甚至车载网络的访问权限。然而,集中式车载网络所面临的挑战不仅限于此:每当车辆计算机(通常划分为多个虚拟机)接管多个ECU的软件应用程序和功能时,对安全组件的需求也会增加。新一代的HSM也为此做好了准备。物理上,HSM的安全功能封装在相应处理器的HSM内核中。在那里,安全功能通过HSM软件协议栈激活和操作。因此,车辆计算机的主控制器可以专注于其实际任务,而HSM内核则处理安全性的要求:安全的车载通信、运行时的操作检测以及安全的启动、刷新、日志记录和调试。这使HSM比纯粹基于软件的安全解决方案要强大得多。
新一代的HSM将具备一个精简的实时操作系统,或者称之为固件。新的HSM固件可确保HSM内核最多处理16个并行会话,而HSM软件中的会话数量可配置。这种多核和多应用程序支持的秘密在于HSM固件驱动程序的特殊体系结构。这允许不同的虚拟化应用程序独立集成驱动程序,从而为独立开发各种软件部件铺平了道路:在集成过程中,“链接器”步骤可确保驱动程序的各种实例在硬件的共享RAM中使用通用结构。新一代HSM设计用于多核和多应用程序任务,使用批量MAC接口,即使在高数据负载和异构格式的情况下,也可以确保通信的实时性。
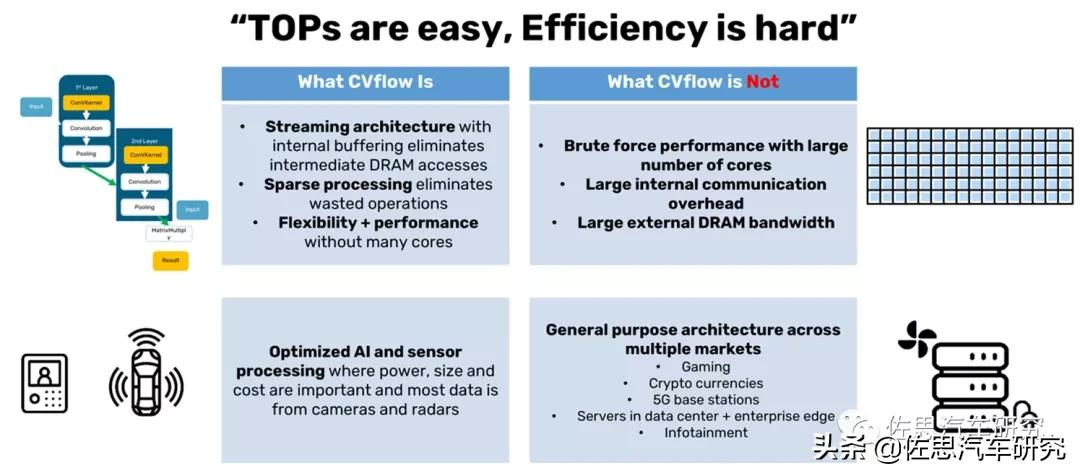
安霸的AI加速器是CVflows,安霸没有透露过太多细节,核心就是数据流架构,类似于DSP。数据流架构是一种计算机体系结构,直接与传统的冯·诺依曼架构或控制流体系结构进行对比,数据流架构没有概念上的指令计数器(所以它的算力无法使用TOPS这样的单位,安霸只能说等效于500TOPS)。其使用粗粒度表示(Coarse-grained Representation)来提高数据的并行度,并允许编译器同时调度多个顺序循环和功能,以实现更高的吞吐量及更低的延迟。
现在大部分的GPU、CPU都是基于指令集的架构,应用层可以通过软件和编辑器去将语言最终转化为机器语言,即二进制的码,从而执行指令和操作,并保证对不同应用的兼容性。DSP有个重复循环机制,即进入这种模式时,指令自动变为单周期指令,零存储开销,零译码开销,效率飞速增加。某种意义上等于没有了指令的概念。安霸的CVflows应该就是这种设计。
图片来源:互联网
传统AI加速器靠堆砌MAC数量,数量越多,算力越强,非常简单粗暴,缺点是成本高,效率低。
图片来源:互联网
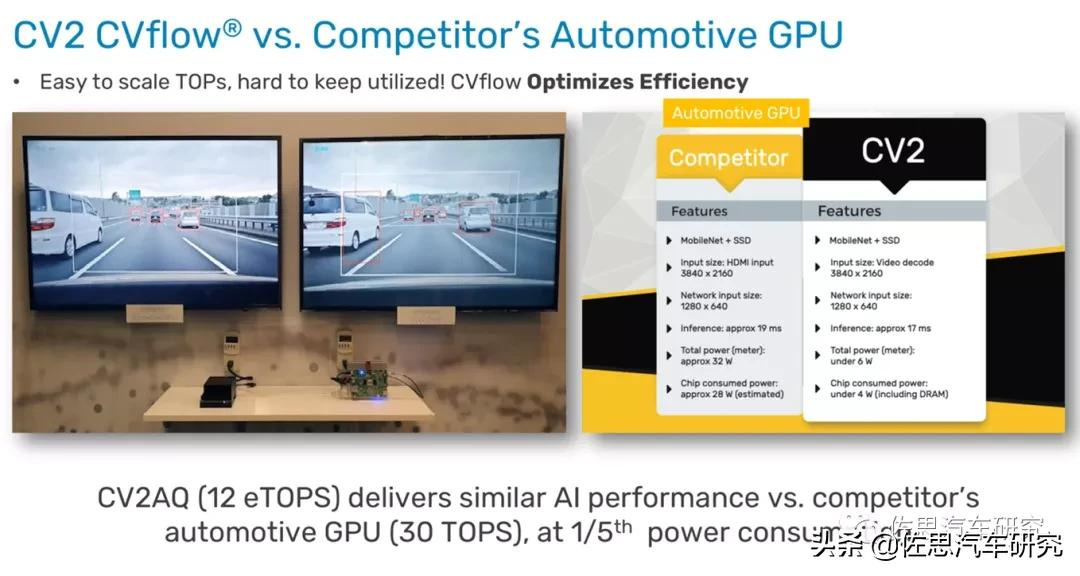
安霸特别拿英伟达的Xavier做了个对比,汽车GPU达到30TOPS算力的只有英伟达的Xavier。安霸的效率是英伟达的5倍。
图片来源:互联网
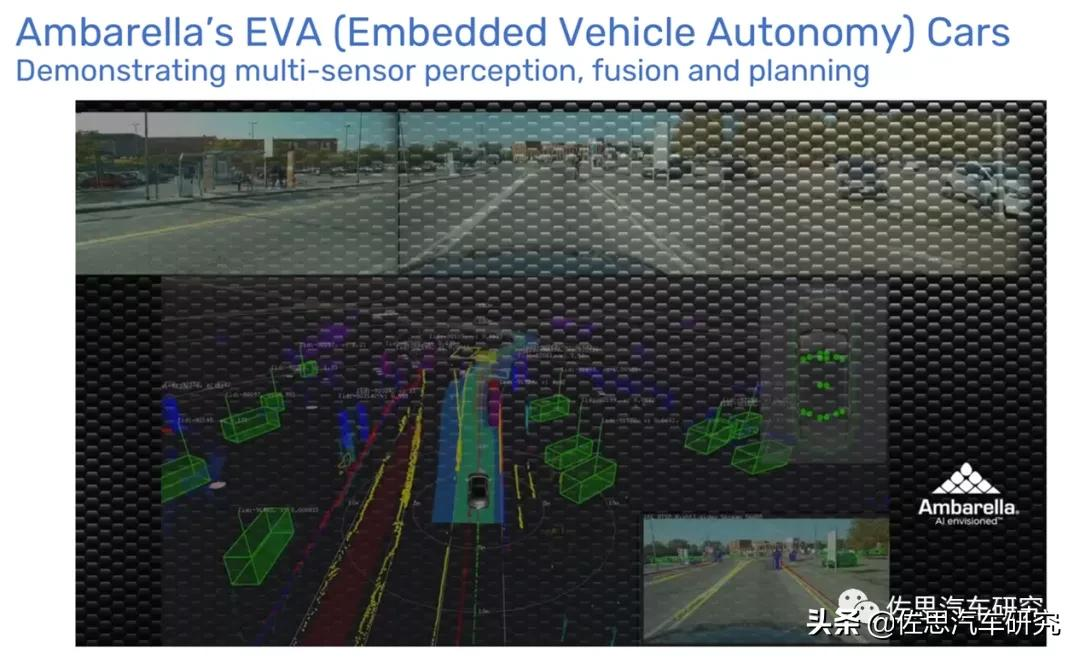
安霸也提供完整的软件协议栈,还精细地分为有HD地图和无HD地图两种模式。
安霸的EVA原型车演示界面
图片来源:互联网
图片来源:互联网
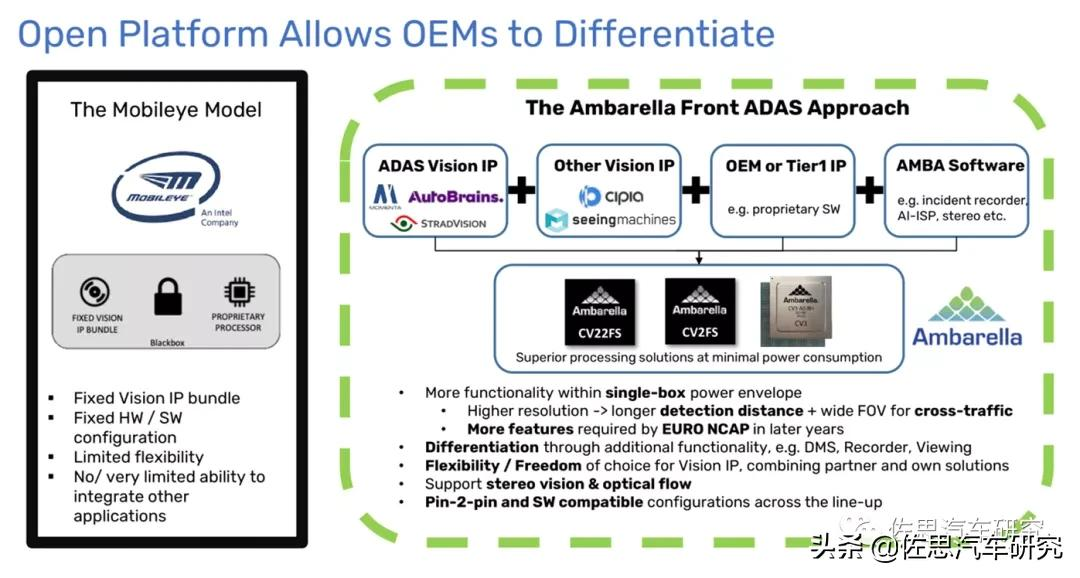
安霸也不会忘记与Mobileye对比,安霸是一个开放的平台。

图片来源:互联网
安霸汽车软件合作伙伴,其中DMS领域的Seeing Machines是澳洲上市公司,其产品大量用于通用汽车上。

图片来源:互联网
除了CVflows,安霸另一个特色是立体双目,上图中Rivian的R1T就用了安霸的CV2实现立体双目。
立体双目的主要使用者包括奔驰、路虎、雷克萨斯、斯巴鲁、本田第一辆L3和铃木,支持立体双目的Tier1包括博世、德国大陆汽车、日立、电装、电产和华为。立体双目需要深厚的技术积累。
必须说激光雷达或立体双目是L3级智能驾驶必备的传感器,自动驾驶领域,感知部分的任务就是建立一个准确的3D环境模型。深度学习加单目三目是无法完成这个任务的。单目和三目摄像头的致命缺陷就是目标识别(分类)和探测(Detection)是一体的,无法分割。必须先识别才能探测得知目标的信息,而深度学习的穷举法特性导致其肯定会出现漏检,也就是说3D模型有缺失,因为深度学习的认知范围来自其数据集,而数据集是有限的,不可能穷举所有类型,因此深度学习容易出现漏检而忽略前方障碍物,也就是说如果无法识别目标,系统会认为前方障碍物不存在,不做任何减速,特斯拉多次事故多半皆是这个原因。传统算法,则可能无法识别前方障碍物,但依然能够获知前方障碍物的信息,能够最大限度地保证安全。当然这需要传感器配合,激光雷达和双目立体视觉都是以传统算法为核心(因为它不需要识别目标也能探测到目标的3D信息,当然你也可以用深度学习处理激光雷达数据,也可以让激光雷达识别目标)。也就是说三目系统只能用于L2,因为它必然有漏检,漏检是无法避免的,L2以上必须要有激光雷达或立体双目。
所以即使特斯拉的HW4.0(FSD Beta)算力再高也是L2,也是无法避免漏检的,并且FSD Beta版在识别与对于物品的警示功能方面仍有限,对于静态的物体、紧急驶出的车辆、施工区域、较复杂的十字路口等无法进行辨别。
安霸之后或许会出现更多的英伟达挑战者,三星的5纳米产能充足,价格估计不到台积电的1/4,超过1000TOPS算力也不是什么难事,超过4TFLOPS的GPUIP也有出现。就是ARM的A78架构比较昂贵。单纯从芯片指标挑战英伟达并不困难,难的是整体竞争力。
报告订购及合作咨询私信小编
佐思 2022年研究报告撰写计划
智能网联汽车产业链全景图(2021年12月版)
主机厂自动驾驶
汽车视觉(上)
高精度地图
商用车自动驾驶
汽车视觉(下)
高精度定位
低速自动驾驶
汽车仿真(上)
OEM信息安全
ADAS与自动驾驶Tier1
汽车仿真(下)
汽车网关
汽车与域控制器
毫米波雷达
APA与AVP
域控制器排名分析
车用激光雷达
驾驶员监测
激光和毫米波雷达排名
车用超声波雷达
红外夜视
E/E架构
Radar拆解
车载语音
汽车分时租赁
充电基础设施
人机交互
共享出行及自动驾驶
汽车电机控制器
L4自动驾驶
EV热管理系统
混合动力报告
L2自动驾驶
汽车功率电子
汽车PCB研究
燃料电池
无线通讯模组
汽车IGBT
汽车OS研究
汽车5G
汽车线束
线控底盘
合资品牌车联网
V2X和车路协同
转向系统
自主品牌车联网
路侧智能感知
模块化报告
自主品牌ADAS研究
商用车车联网
商用车ADAS
汽车多模态交互
汽车智能座舱
车载显示
Tier1智能座舱(上)
座舱多屏与联屏
智能后视镜
Tier1智能座舱(下)
智能座舱设计
汽车照明
座舱SOC
汽车VCU研究
汽车座椅
汽车数字钥匙
TSP厂商及产品
HUD行业研究
汽车云服务平台
OTA研究
汽车MCU研究
AUTOSAR研究
智慧停车研究
传感器芯片
软件定义汽车
Waymo智能网联布局
ADAS/AD主控芯片
T-Box市场研究
自动驾驶法规
ADAS数据年报
T-Box排名分析
智能网联和自动驾驶基地
汽车镁合金压铸
乘用车摄像头季报
智能汽车个性化
飞行汽车
专用车自动驾驶
农机自动驾驶
矿山自动驾驶
港口自动驾驶
自动驾驶重卡
无人接驳车
仪表和中控显示
车载DMS
合资品牌ADAS
800V高压平台
本土品牌环视
汽车无线模组
「佐思研究月报」
ADAS/智能汽车月报 | 汽车座舱电子月报 | 汽车视觉和汽车雷达月报 | 电池、电机、电控月报 | 车载信息系统月报 | 乘用车ACC数据月报 | 前视数据月报 | HUD月报 | AEB月报 | APA数据月报 | LKS数据月报 | 前雷达数据月报
声明:本文由"麦兜"发布,不代表"知识分享"立场,转载联系作者并注明出处:https://www.wuxiaoyun.com/auto/7471.html
